
Peugeot 208: Parking sensors
Peugeot 208 Owners Manual
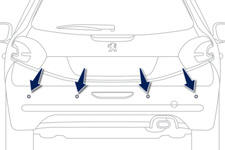
This system indicates the proximity of an obstacle (person, vehicle, tree, gate, etc.) which comes within the field of detection of sensors located in the bumper.
Certain types of obstacle (stake, roadworks cone, etc.) detected initially will no longer be detected at the end of the manoeuvre due to the presence of blind spots.
This function cannot, in any circumstances, take the place of the vigilance and responsibility of the driver.


Other info:
Renault Clio. Filters
The replacement of filter components
(air filter, cabin filter, diesel filter, etc.)
is scheduled in the maintenance operations
for your vehicle.
Replacement intervals for filter elements:
refe ...
Chevrolet Sonic. Replacing LATCH System Parts After a Crash
Warning
A crash can damage the LATCH system in the vehicle. A damaged LATCH system
may not properly secure the child restraint, resulting in serious injury or even
death in a crash. To help make ...
Chevrolet Sonic. Securing Child Restraints (Rear Seat)
When securing a child restraint in a rear seating position, study the instructions
that came with the child restraint to make sure it is compatible with this vehicle.
If the child restraint has the ...
Manuals For Car Models
-
 Chevrolet Sonic
Chevrolet Sonic -
 Citroen C3
Citroen C3 -
 Fiat Punto
Fiat Punto -
 Honda Fit
Honda Fit -
 Mazda 2
Mazda 2 -
 Nissan Micra
Nissan Micra -
 Peugeot 208
Peugeot 208 -
 Renault Clio
Renault Clio -
 Seat Ibiza
Seat Ibiza -
 Skoda Fabia
Skoda Fabia - Honda Pilot
- Volkswagen ID4
- Toyota Prius